
I am a research scientist at NVIDIA, where I work on generative world models for autonomous physical agents. My research interests span world models, video generation, 3D/4D generative modeling, humanoid motion, simulation, and reinforcement learning.
I did my PhD in Computer Science at the University of Toronto and the Vector Institute, co-supervised by Florian Shkurti and Sanja Fidler. Before that, I studied Engineering Physics at UBC, where I worked with Michiel van de Panne.
Selected publications
-
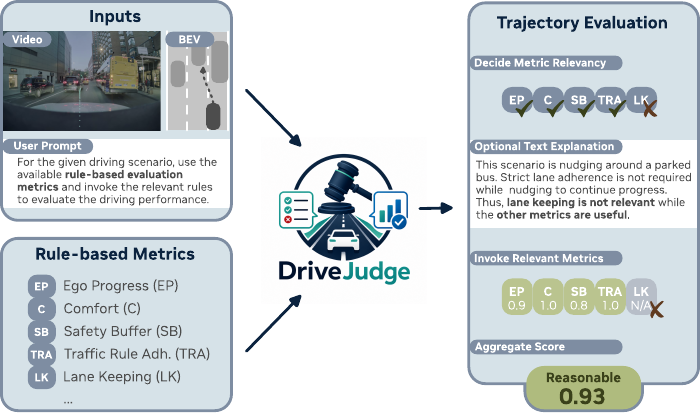
DriveJudge: Rethinking Autonomous Driving Evaluation with Vision-Language Models
arXiv preprint, 2026
A context-aware AV evaluation framework combining rule-based metrics with VLM reasoning about when rules should apply, avoiding over-penalizing reasonable long-tail driving behavior.
-
NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
arXiv preprint, 2026
A causal-diffusion generative world model trained on 21k hours of driving data that renders action-conditioned multi-view AV sensor video at up to 105 FPS per camera for closed-loop policy evaluation.
More publications
-
Cosmos 3: Omnimodal World Models for Physical AI
arXiv preprint, 2026
A family of omnimodal world models that jointly process and generate language, image, video, audio, and action within a unified mixture-of-transformers, subsuming VLMs, video generators, world simulators, and world-action models into one framework.
-
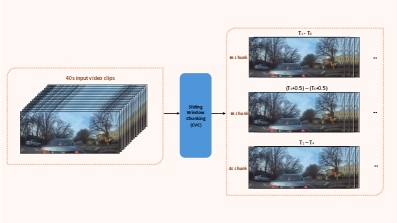
VLM-AutoDrive: Post-Training Vision-Language Models for Safety-Critical Autonomous Driving Events
arXiv preprint, 2026
A modular post-training framework (captions, VQA pairs, chain-of-thought supervision) that adapts pretrained VLMs to detect rare safety-critical dashcam events.
-
Cosmos-Transfer1: Conditional World Generation with Adaptive Multimodal Control
arXiv preprint, 2025
An open-sourced conditional world-generation model producing controllable world simulations from adaptively-weighted multimodal spatial inputs, targeting Sim2Real for robotics and AV.
-
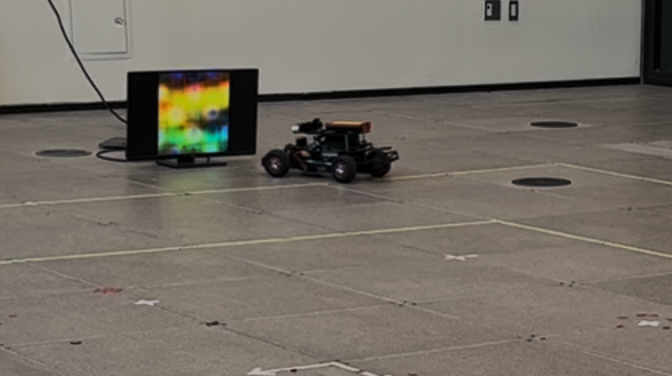
Generating Transferable Adversarial Simulation Scenarios for Self-Driving via Neural Rendering
CoRL, 2023
Discovers adversarial driving scenarios by optimizing object placement and textures inside a neural rendering of the deployment scene, with attacks transferring to a real RC-car track.
-
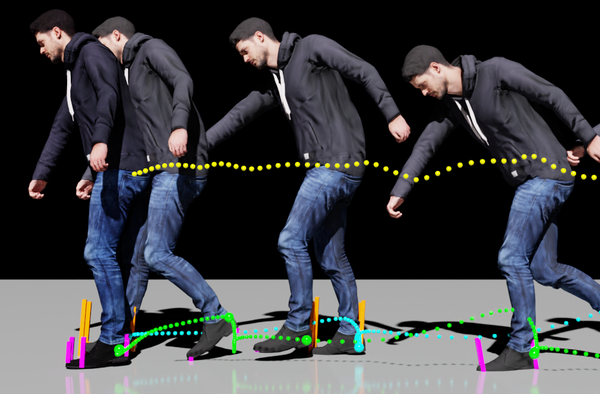
Learning Human Dynamics in Autonomous Driving Scenarios
ICCV, 2023
Learns physically plausible human dynamics directly from real-world driving footage, enabling simulated pedestrians that behave like real ones.
-
KAMA: 3D Keypoint Aware Body Mesh Articulation
3DV, 2021
An analytical solution that articulates the SMPL body model directly from 26 regressed 3D keypoints, achieving image-aligned mesh recovery without paired mesh annotations.
-
Continual Model-Based Reinforcement Learning with Hypernetworks
ICRA, 2021
Task-conditional hypernetworks continually learn dynamics models across task sequences without revisiting old data.
A full, up-to-date list is on Google Scholar.