Kevin Xie
My research interests surround learning-based methods for simulation and control and include generative modelling, model-based reinforcement learning and character control.
Email:

Publications
|
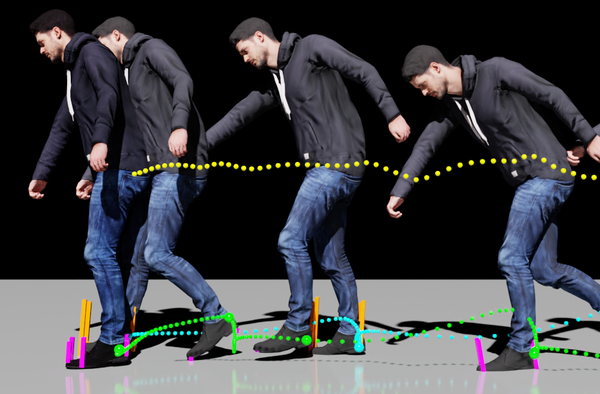
Physics-based Human Motion Estimation and Synthesis from Videos
Kevin Xie, Tingwu Wang, Umar Iqbal, Yunrong Guo, Sanja Fidler Florian Shkurti Video pose estimation quality can be improved greatly by enforcing physics consistency. ICCV, 2021 paper website |
|
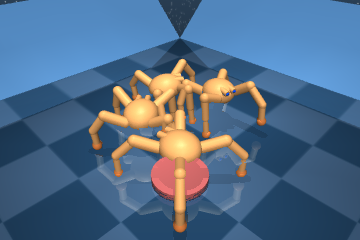
Skill Transfer via Partially Amortized Hierarchical Planning
Kevin Xie*, Homanga Bharadhwaj*, Danijar Hafner, Animesh Garg, Florian Shkurti Learning temporally extended skills for planning with a world model improves MBRL training and transfer. ICLR, 2021 paper website |
|
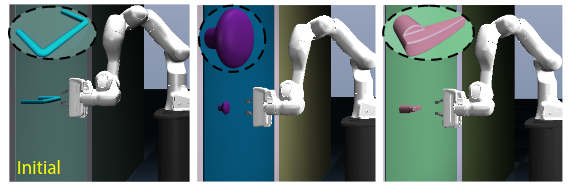
Continual Model-Based Reinforcement Learning with Hypernetworks
Philip Huang, Kevin Xie, Homanga Bharadhwaj, Florian Shkurti Task-conditioned hypernetworks continually adapt to change in environment dynamics with a limited replay buffer. Deep RL Workshop (NeurIPS), 2020 paper |
|
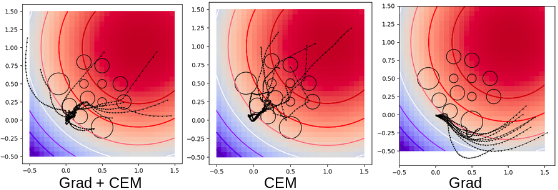
Model-Predictive Planning via Cross-Entropy and Gradient-Based Optimization
Homanga Bharadhwaj*, Kevin Xie*, Florian Shkurti, Updating the top action sequences identified by CEM through a few gradient steps helps improve sample efficiency and performance of planning in Model-based RL. L4DC, 2020 paper |
|
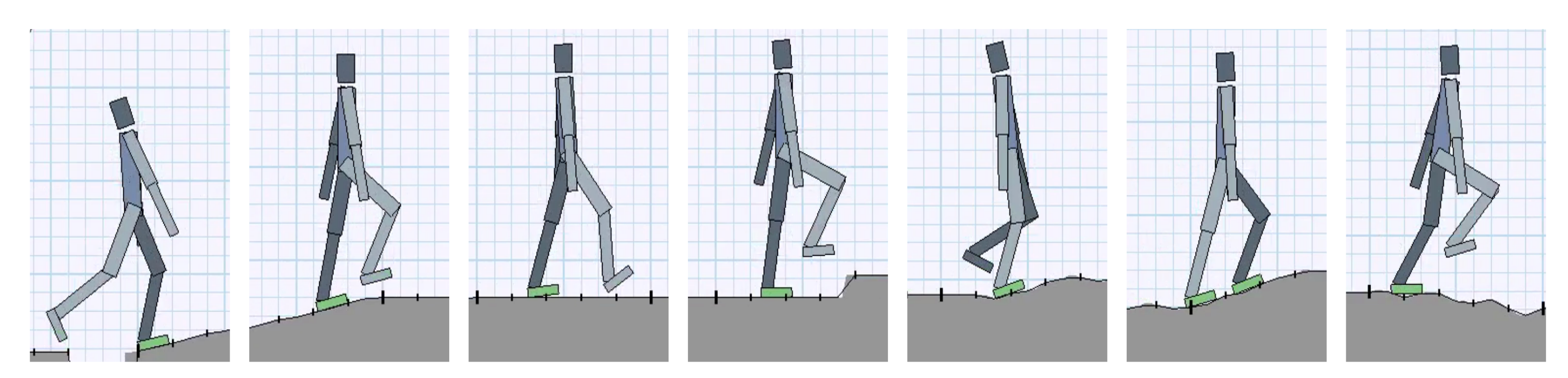
Progressive Reinforcement Learning with Distillation for Multi-Skilled Motion Control
Glen Berseth*, Kevin Xie*, Paul Cernek, Michiel van de Panne Progressive learning and integration via distillation (PLAID) allows a single policy to quickly acquire new locomotion skills. ICLR, 2018 arXiv |